Additional Results
Evolution of the knife force profile while the simulation parameters are calibrated via gradient-based optimization. The ground-truth trajectory has been obtained from a real force sensor attached to a robot cutting a real apple.
Mesh Generalization via Optimal Transport
We use Optimal Transport to transfer optimized cutting spring parameters between different meshes of the same material. In this example, the parameters are transferred from a prism mesh to a half-cylinder mesh with potato material properties. Groundtruth knife forces stem from a state-of-the-art commercial simulator.
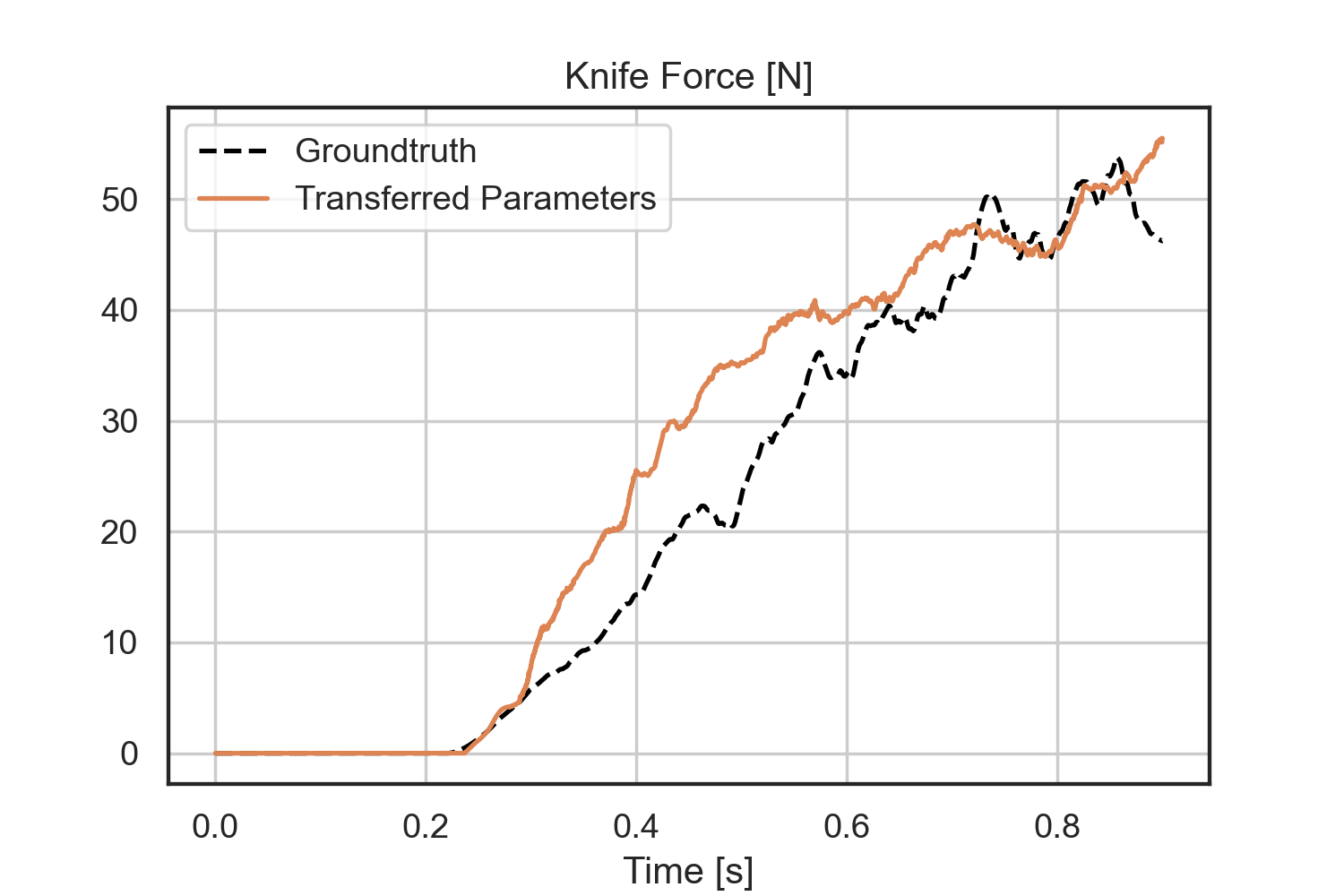
Knife force profile of the transported cutting spring parameters (orange) against the ground-truth knife force profile (black) from a commercial simulator on a half-cylinder mesh with potato material properties.
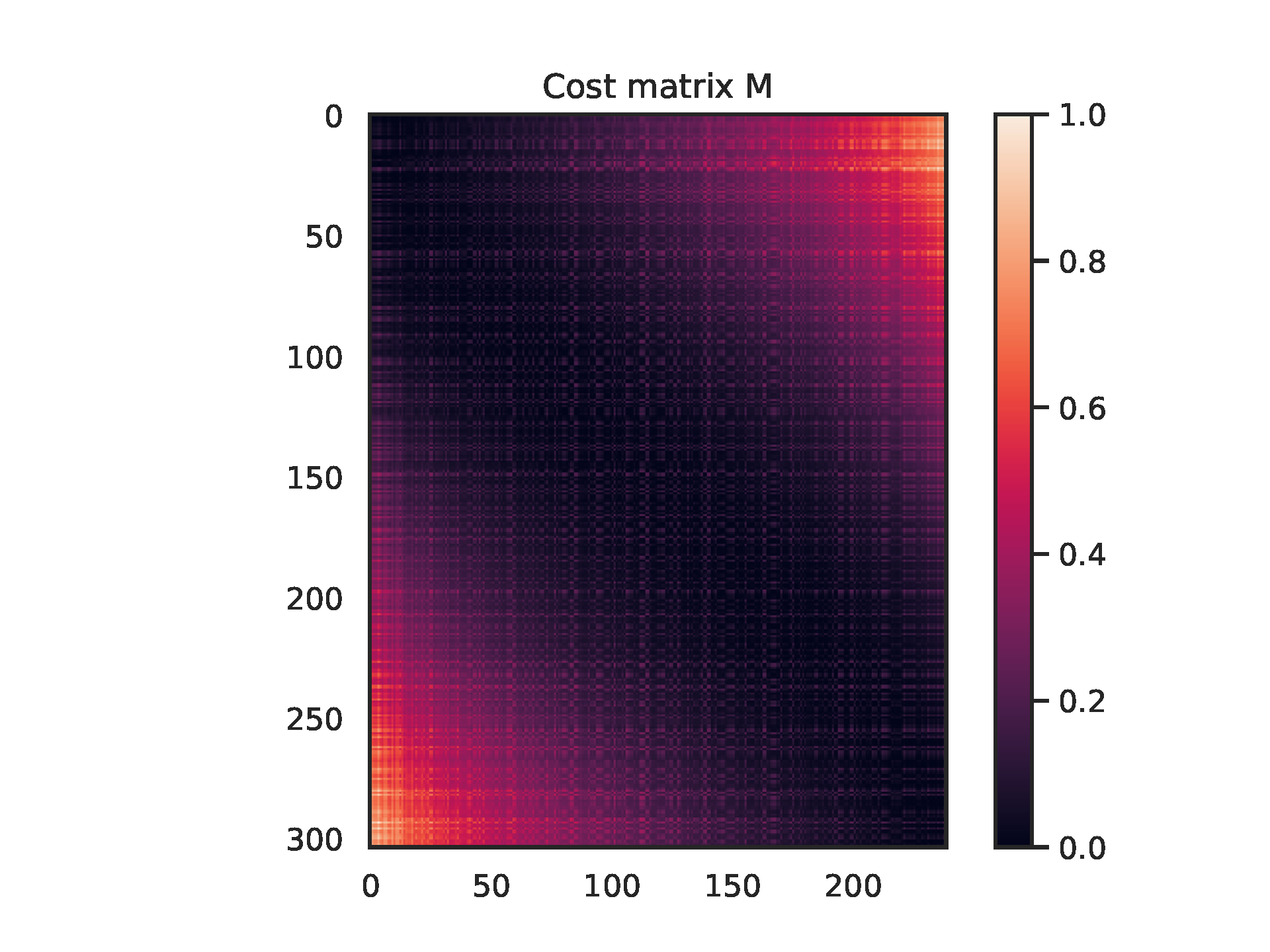
Cost matrix (pair-wise squared distances) between 2D spring coordinates from the source mesh (prism) and the target mesh (cylinder).
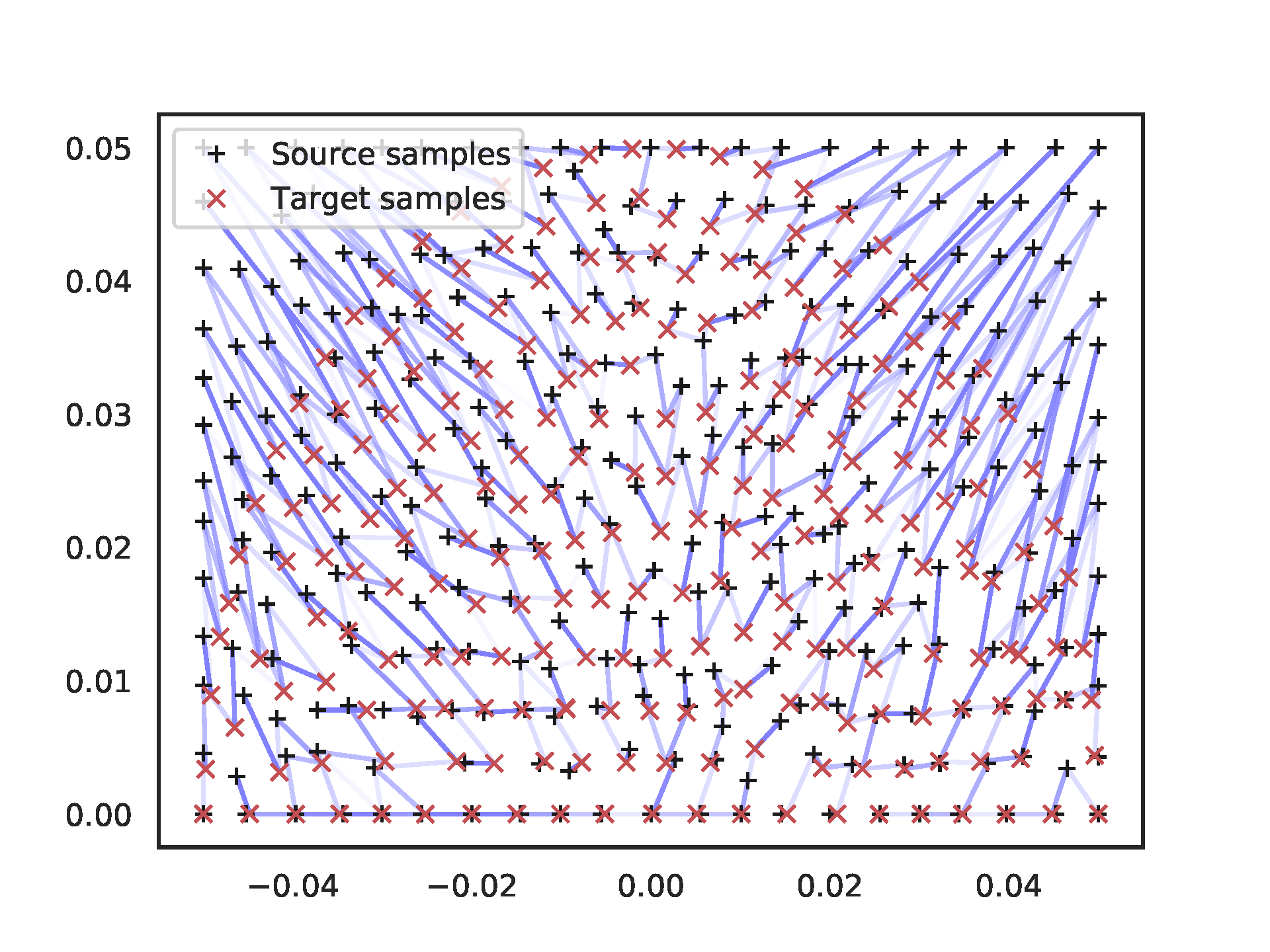
Correspondences between source and target cutting spring coordinates found by Optimal Transport using the Earth Mover's Distance metric.
Transported cutting spring parameters:
Cutting spring stiffness
Contact normal force stiffness
Cutting spring softness
Contact friction coefficient
Contact damping coefficient
Contact friction stiffness
Cutting Motion Optimization
We leverage the end-to-end differentiability of our simulator to optimze a control cost function to find fast, energy-efficient cutting trajectories. By employing hard constraints on the lateral knife motion, a sawing movement emerges:
Initial trajectory (before optimization)
Unconstrained optimization
Constrained optimization